
Not seeing an exact fit? We’ll customize it for you.
Embedded Imaging Devices
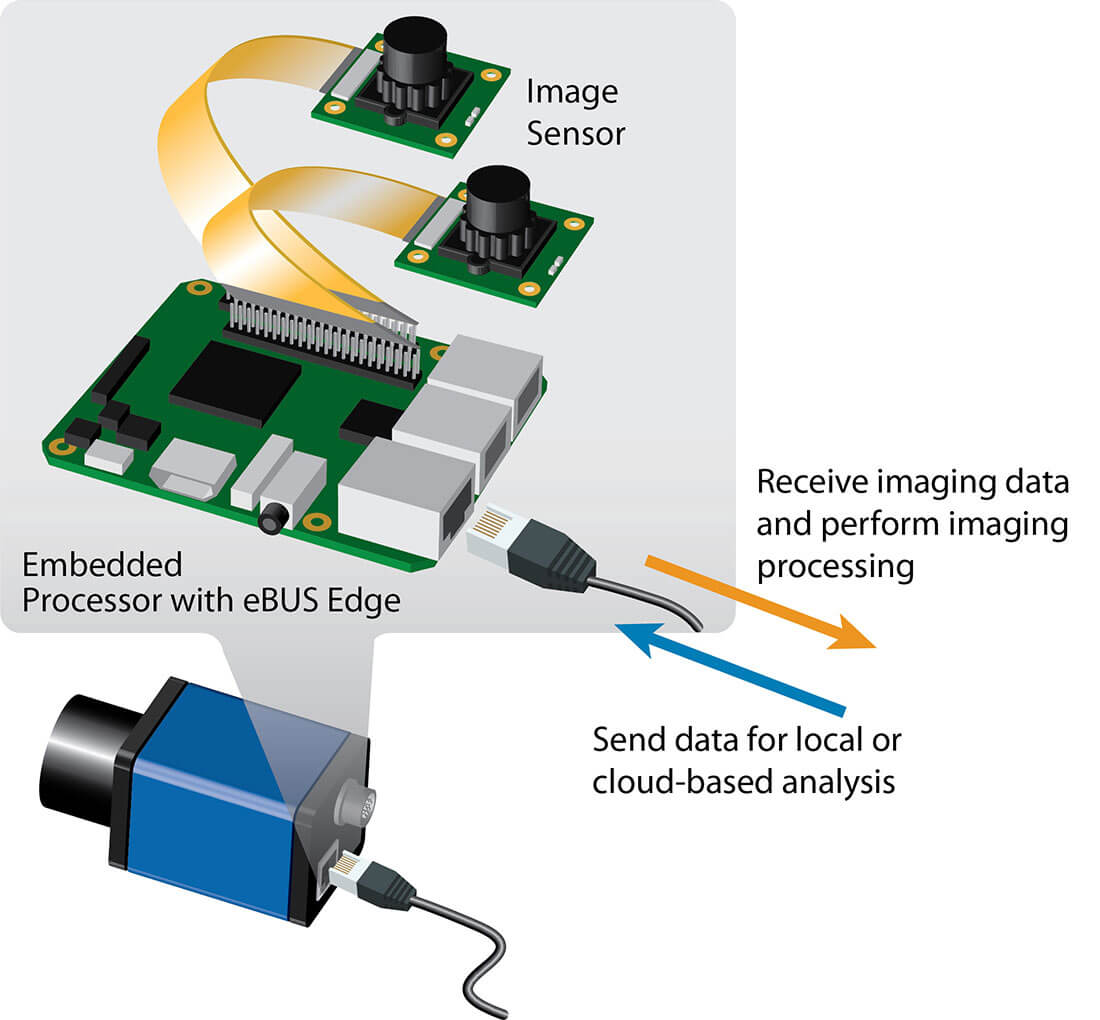
Pleora’s eBUS Edge provides a straightforward and cost-effective way to develop smart imaging and sensor connectivity for machine vision, industrial robotics, and Internet of Things (IoT) applications.
New robotics and smart sensor applications that require numerous integrated image and data sources pose significant bandwidth and networking challenges. To help solve the bandwidth crunch, smart devices – including compact sensors, cameras, and embedded processing – can process data at the edge of the inspection network. This significantly reduces the amount of data required to be transmitted back to a centralized processing power for more complex analysis tasks.
eBUS Edge is a software-only approach for converting any device into a GigE Vision, GenICam compliant device, that supports image transmission and enables the device to respond to control requests from a host controller. Ideal for compact robotics with a small footprint, designers can implement or upgrade specialty cameras or sensors without a major retrofit or additional hardware. This simple to implement solution turns any device or sensor into a fully compliant GigE Vision device, allowing for interoperability between devices, and the use of standards-compliant third-party image processing systems.
Unique Advantages
- Software-only approach to smart sensor design for machine vision and Internet of Things (IoT)
- Network sensors and devices
- Use third-party processing tools


